A PhD candidate at the Department of Applied Mechanics of the Budapest University of Technology and Economics. My research topic is the examination of the human balacing and running through simple mechanical and mathematical models.

Professional experience
Technical assistant: Department of Applied Mechanics, BME, 2024 -
Intern: GeoLink3D Ltd., 3D modelling, 2018-2019.
Summer intern: CLAAS Hungária Ltd., R&D, simulation subdepartment, 2017.06-08.
Research projects
MTA-BME Lendület Global Dynamics Research Group, 2022-
Education
CISM course, Delays and structures in dynamical systems: modeling, analysis and numerical methods, 2023
PhD student, Department of Applied Mechanics, BME, 2020 - 2024
Project: Az emberi helyváltoztatás nemlineáris dinamikájának vizsgálata izommodellek bevonásával
Supervisor: Ambrus ZELEI (Széchenyi István University, Győr, Hungary)
Erasmus+, Faculty of Mechanical Engineering, University of Bristol, 2019/20/2
Mechanical Engineering MSc, Applied Mechanics specialization, BME, 2018-2020
Final project: Muscle models for the analysis of the energetic costs of balancing
Supervisors: Ambrus ZELEI (BME), Professor Alan R. CHAMPNEYS (University of Bristol)
Erasmus+, Faculty of Science and Engineering, Linköping University, 2017/18/2
Industrial Design Engineering BSc, BME, 2014-2018.
Final project: Design of skill development accessible game
Supervisor: Anita DARABOS DLA (BME, GT3)
Consultant: Dr. Erika JÓKAI (BME, GTK)
Volunteering
BME GPK PÁGGTDI Doctoral Scientific Committee member, 2023-2024
MeMento mentor, 2021-2024
Tech Team member at the 9th European Nonlinear Dynamics Conference (ENOC 2017)
Language skills
Hungarian - native English - C2 French - B1
Skills
MatLab, 3D modelling (Inventor, CATIA, PTC Creo), LaTex, Wolfram Mathematica, Office, InDesign
Recognitions, scholarships
New National Excellence Programme scholar, 2023.
Ma thèse en 180 secondes (MT180) competition III. place in the Hungarian final (2023.)
Scholarship of the Republic: 2019., 2017., 2016.
National Scientific Students’ Conference: II. place (2019.)
Scientific Students’ Conference: I. place (2018.), III. place (2018., 2016., 2016., 2015.)
ABB Female Mentor Program Scholar, 2017.
Babinszki Imre Scholarship, 2016.
Hobbies
-

Drawing
-

Boardgames
-

Video games
-

Music
To watch the gifs, click on them!
Biomechanics
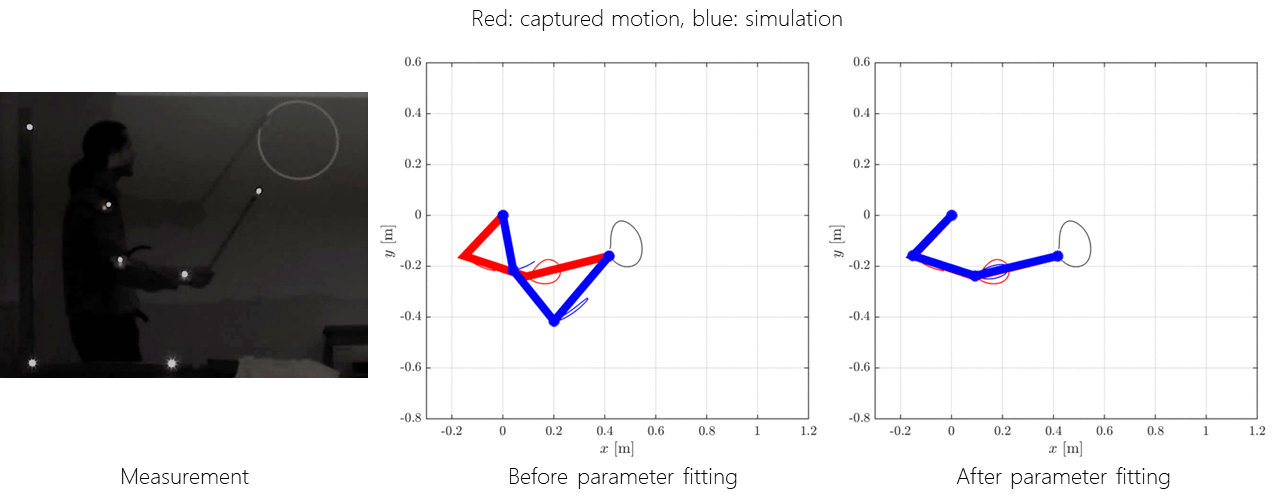
Inverse kinematics
Examination of the motion planning of the human arm through a plannar three-linked redundant mechanism. The goal was to compare measurement data to simulation results computed according to the most often used inverse kinematic methods.
Main competencies: analysis of mechanisms, inverse kinematics, numerical methods for integration,
measurement and measurement processing
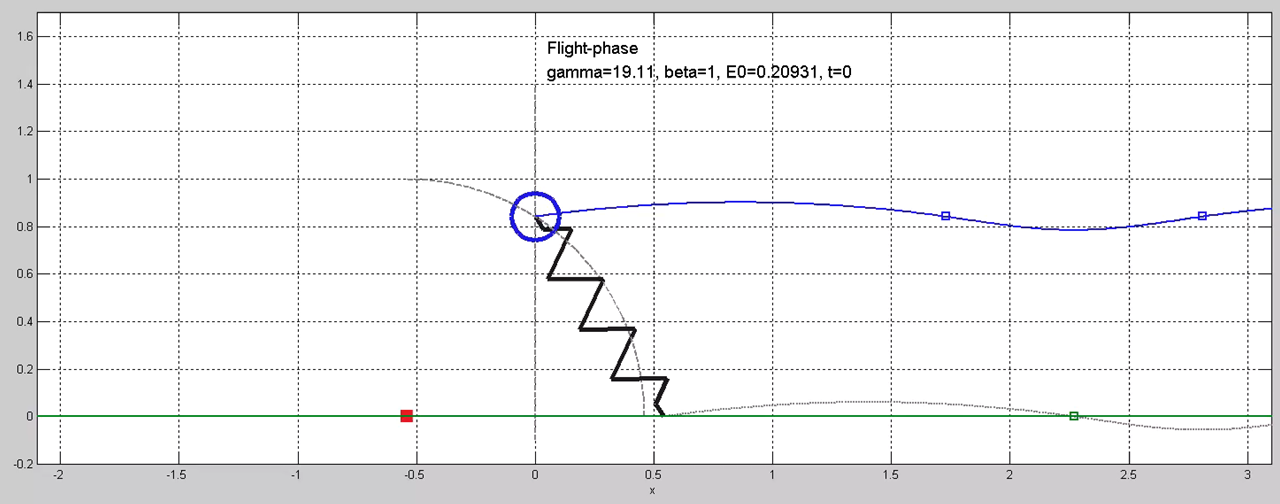
 SLIP model
SLIP model
Examination of the running motion through the so called spring loaded inverted pendulum (SLIP) model. The focus is on the stability criterion of the system, how that depends on the paramters of the model. The model can be modified by using muscle models instead of the spring part and/or increasing its degrees of freedom.
Main competencies: stability analysis of periodic orbits with the associated numerical methods
3D stability diagramm of the SLIP model: Matlab files
Publications
Journal, conference papers
Dóra PATKÓ, Ambrus ZELEI: "Comparison of feed-forward control strategies for simplified vertical hopping model with intrinsic muscle properties." In: Bioinspiration & Biomimetics, (2024), 19(6), 066001
Ábel Mihály NAGY. Dóra PATKÓ, Ambrus ZELEI: "Discovery and Interactive Representation of the Dimensionless Parameter-Space of the Spring-Loaded Inverted Pendulum Model of Legged Locomotion Using Surface Interpolation." In: Springer Proceedings in Mathematics & Statistics, (2024), 454, pp. 373–386
Dóra PATKÓ, Ábel Mihály NAGY, Ambrus ZELEI: "A futás és szökdelés tömeg-rugó modell dinamikai viselkedésének globális feltérképezése és paraméterhangolása." In: Biomechanica Hungarica, (2022), 15(1), pp. 39-50
Dóra PATKÓ, Ambrus ZELEI: "Velocity and acceleration level inverse kinematic calculation alternatives for redundant manipulators." In: Meccanica - An International Journal of Theoretical and Applied Mechanics AIMETA, (2021), 56(4), pp. 887-900
Conference abstracts, posters
Dóra PATKÓ, Guiseppe HABIB: "Rapid algorithm for estimating dynamical integrity of periodic orbits" Investigating Dynamics in Engineering and Applied Science (IDEAS2024), poster, Budapest, 2024.07.29-31.
Dóra PATKÓ, Guiseppe HABIB: "Rapid iterative algorithm to estimate the dynamical integrity of limit cycles" 11th European Nonlinear Dynamics Conference (ENOC2024), Delft, Netherlands, 2024.07.22-26.
Dóra PATKÓ, Ambrus ZELEI, Guiseppe HABIB: "Harmonikusan gerjesztett rendszerek robusztusságának becslése a dinamikai integritás mérőszámával" XIV. Magyar Mechanikai Konferencia (MaMeK 14), Miskolc, 2023.08.29-31.
Dóra PATKÓ, Ambrus ZELEI, Guiseppe HABIB: "Comparison of feed-forward control strategies for hopping model with intrinsic muscle properties of different complexities" Third International Nonlinear Dynamics Conference (NODYCON 2023), Rome, ITALY, 2023. June 18-22.
Dóra PATKÓ, Ambrus ZELEI: "Symmetry, benefit or disadvantage? Energy consumption of simple hopping model with intrinsic muscle properties" 6th International Conference of Dynamic, Vibration and Control (ICDVC2022+1), On-line, April 7-9 2023.
Dóra PATKÓ, Ambrus ZELEI: "Numerical stability analysis of the conservative SLIP model with a Hill-type muscle" ECCOMAS Thematic Conference on Multibody Dynamics, On-line, December 12-15, 2021.
Ábel Mihály NAGY, Dóra PATKÓ, Ambrus ZELEI: "Discovery and Online Interactive Representation of the Dimensionless Parameter-Space of the Spring-Loaded Inverted Pendulum Model of Legged Locomotion Using Surface Interpolation." 16th Internation Conference on Dynamical Systems, Theory and Aplications (DSTA 2021), On-line, December 6-9, 2021.
Dóra PATKÓ, Ambrus ZELEI: "Egyszerűsített Hill-izommodell használata tömeg-rugó modellel - lehetséges az aszimptotikus stabilitás?" 8. Magyar Biomechanikai Konferencia, On-line, April 09, 2021.
Ambrus ZELEI, Dóra PATKÓ: "Alternative inverse kinematic calculation methods in velocity and acceleration level." 15th Internation Conference on Dynamical Systems, Theory and Aplications (DSTA 2019), Lodz, Poland, December 2-5, 2019.
PATKÓ Dóra, ZELEI Ambrus: "A poszturális egyensúlyozás és a futás stabilizációjához felhasznált energiamennyiség viszonyának becslése." XXVII. Nemzetközi Gépészeti Konferencia (OGÉT 2019), Nagyvárad, Románia, April 25–28, 2019.
Dóra PATKÓ, Ambrus ZELEI: "Kinematic Redundancy Resolution in Robotics and in Human Motion - An Experimental Case Study." The Fourth Joint International Conference on Multibody System Dynamics (IMSD 2016), Montréal, Canada, May 29–June 2, 2016.