2-D Target Segment
TARGE169 Element Description
TARGE169 is used to represent various 2-D "target" surfaces for the associated contact elements (CONTA171, CONTA172, and CONTA175). The contact elements themselves overlay the solid elements describing the boundary of a deformable body and are potentially in contact with the target surface, defined by TARGE169.
You can impose translational or rotational displacement, temperature, voltage, magnetic potential, pore pressure, and concentration on the target segment element. You can also impose forces and moments on target elements. See TARGE169 in the Mechanical APDL Theory Reference for more details about this element. To represent 3-D target surfaces, use TARGE170, a 3-D target segment element.
For rigid targets, these elements can easily model complex target shapes. For flexible targets, these elements will overlay the solid elements describing the boundary of the deformable target body.

TARGE169 Input Data
The target surface is modeled through a set of target segments. Typically, several target segments make up one target surface.
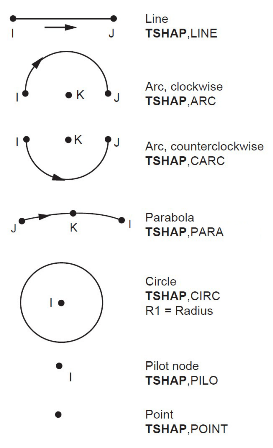
Figure 169.2: TARGE169 2-D Segment Types shows the available segment types for TARGE169.
For any target surface definition, the node ordering of the target segment element is critical for proper detection of contact. The nodes must be ordered so that, for a 2-D surface, the associated contact elements (CONTA171, CONTA172, or CONTA175) must lie to the right of the target surface when moving from target node I to target node J. For a rigid 2-D complete circle, contact must occur on the outside of the circle; internal contacting is not allowed.
Pair-Based Contact versus General Contact
There are two methods to define a contact interaction: the pair-based contact definition and the general contact definition. Both contact definitions can exist in the same model. TARGE169 can be used in either type of contact definition.
Pair-Based Contact
In a pair-based contact definition, the 2-D contact elements (CONTA171, CONTA172, or CONTA175) are associated with 2-D target segment elements (TARGE169) via a shared real constant set. The program looks for contact interaction only between surfaces with the same real constant set ID (which is greater than zero). The material ID associated with the contact element is used to specify interaction properties (such as friction coefficient) defined by MP or TB commands.
The target surface can be either rigid or deformable. For rigid-flexible contact, the rigid surface must be represented by a target surface. For flexible-flexible contact, one of the deformable surfaces must be overlaid by a target surface. See Designating Contact and Target Surfaces in the Contact Technology Guide for more information.
Each target surface can be associated with only one contact surface, and vice-versa. However, several contact elements could make up the contact surface and therefore come in contact with the same target surface. Likewise, several target elements could make up the target surface and thus come in contact with the same contact surface. For either the target or contact surfaces, you can put many elements in a single target or contact surface, or you can localize the contact and target surfaces by splitting the large surfaces into smaller target and contact surfaces, each of which contain fewer elements.
If a contact surface may contact more than one target surface, you must define duplicate contact surfaces that share the same geometry but relate to separate targets, that is, have separate real constant set numbers.
General Contact
In a general contact definition, the general contact surfaces are generated automatically by the GCGEN command based on physical parts and geometric shapes in the model. The program overlays contact surface elements (CONTA172) on 2-D deformable bodies (on both lower- and higher-order elements). The general contact definition may also contain target elements (TARGE169) overlaid on the surfaces of standalone rigid bodies and lower-order contact surface elements (CONTA171) on 2-D deformable bodies.
The GCGEN command automatically assigns section IDs and element type IDs for each general contact surface. As a result, each general contact surface consists of contact or target elements that are easily identified by a unique section ID number. The real constant ID and material ID are always set to zero for contact and target elements in the general contact definition.
The program looks for contact interaction among all surfaces and within each surface. You can further control contact interactions between specific surfaces that could potentially be in contact by using the GCDEF command. The material ID and real constant ID input on GCDEF identify interface properties (defined by MP or TB commands) and contact control parameters (defined by the R command) for a specific contact interaction. Unlike a pair-based contact definition, the contact and target elements in the general contact definition are not associated with these material and real constant ID numbers.
Considerations for Rigid Targets
Each target segment is a single element with a specific shape, or segment type. The program supports seven 2-D segment types, as described in Table 169.1: TARGE169 2-D Segment Types, Target Shape Codes, and Nodes. The segment types are defined by one, two, or three nodes and a target shape code (TSHAP command) which indicates the geometry (shape) of the element. The segment location is determined by the nodes.
A radius value is required for the circle segment type. For pair-based contact, the radius is specified by real constant (R1). For a general contact definition, the radius is specified by section data (the SECTYPE,,CONTACT,RADIUS command with the radius entered on the SECDATA command).
Table 169.1: TARGE169 2-D Segment Types, Target Shape Codes, and Nodes
| TSHAP | Segment Type | Node1 (DOF) | Node 2 (DOF)[1] | Node 3 (DOF) | R1 | R2 |
|---|---|---|---|---|---|---|
| LINE | Straight line | 1st corner pt (UX, UY) (TEMP) (VOLT) (AZ) | 2nd corner pt (UX, UY) (TEMP) (VOLT) (AZ) | None | None | None |
| ARC | Arc, clockwise | 1st corner pt (UX, UY) (TEMP) (VOLT) (AZ) | 2nd corner pt (UX, UY) (TEMP) (VOLT) (AZ) | Circle center pt (UX, UY) (TEMP) (VOLT) (AZ) | None | None |
| CARC | Arc, counter- clockwise | 1st corner pt (UX, UY) (TEMP) (VOLT) (AZ) | 2nd corner pt (UX, UY) (TEMP) (VOLT) (AZ) | Circle center pt (UX, UY) (TEMP) (VOLT) (AZ) | None | None |
| PARA | Parabola | 1st corner pt (UX, UY) (TEMP) (VOLT) (AZ) | 2nd corner pt (UX, UY) (TEMP) (VOLT) (AZ) | Midside pt (UX, UY) (TEMP) (VOLT) (AZ) | None | None |
| CIRC | Circle[2][4] | Circle center pt (UX, UY) (TEMP) (VOLT) (AZ) | None | None | Radius | None |
| PILO | Pilot node | 1st point (UX, UY, ROTZ) (TEMP) (VOLT) (AZ) | None | None | None | None |
| POINT | Point[3] | 1st point (UX, UY) | None | None | None | None |
The DOF available depends on the setting of KEYOPT(1) for the associated contact element. For more information, see the element documentation for CONTA171, CONTA172, or CONTA175.
When using the direct generation modeling method to create a circle target segment, specify the R1 value (define the real constant set for pair-based contact; or define the RADIUS section data for general contact) before creating the element.
Rigid surface node. This segment type is only used to apply boundary conditions to rigid target surfaces.
The surface projection contact method (KEYOPT(4) = 3 on the contact element) does not support primitive target segments.
For simple rigid target surfaces, you can define the target segment elements individually by direct generation. You must first specify the SHAPE argument for the TSHAP command. When creating circles through direct generation, you must also define the radius value before creating the element (specify real constant R1 for pair-based contact, or specify the RADIUS section type via SECTYPE and SECDATA commands for general contact).
For general 2-D rigid surfaces, target segment elements can be defined by line meshing (LMESH). You can also use keypoint meshing (KMESH) to generate the pilot node.
If the TARGE169 elements are created via automatic meshing (LMESH or KMESH), then the TSHAP command is ignored and the program chooses the correct shape automatically.
For rigid-to-flexible contact, by default, the program automatically fixes the structural degree of freedom for rigid target nodes if they aren't explicitly constrained (KEYOPT(2) = 0). If you wish, you can override the automatic boundary condition settings by setting KEYOPT(2) = 1 for the target elements. For flexible-to-flexible contact, no special boundary conditions treatment is performed, and the KEYOPT(2) = 0 setting should be used.
You can assign only one pilot node to an entire rigid target surface (or none if it is not needed). In a pair-based contact definition, the target element associated with the pilot node has the same real constant ID as the other target elements in the pair. In a general contact definition, the target element associated with the pilot node has the same section ID, but it has a zero real constant ID, as do the other target elements of each rigid surface in the general contact definition.
The pilot node, unlike the other segment types, is used to define the degrees of freedom for the entire target surface. This node can be any of the target surface nodes, but it does not have to be. All possible rigid motions of the target surface will be a combination of a translation and a rotation around the pilot node. The pilot node provides a convenient and powerful way to assign boundary conditions such as rotations, translations, moments, temperature, voltage, magnetic potential, pore pressure, and concentration on an entire rigid target surface. By default (KEYOPT(2) = 0), you can assign the boundary conditions only to the pilot node, eliminating the need to assign boundary conditions to individual target nodes, thus reducing the chance of errors. The program also automatically fixes the structural degrees of freedom on the pilot node if they aren't explicitly constrained.
By setting KEYOPT(2) = 1 for the target elements, you can apply boundary conditions on any rigid target nodes rather than only on the pilot node. It is your responsibility to make sure the rigid target surface is not under-constrained or over-constrained. It is still recommended that you apply all boundary conditions on the pilot node, even when KEYOPT(2) = 1.
Considerations for Deformable Target Surfaces
For general deformable surfaces, you will normally use the ESURF command to overlay the target elements on the boundary of the existing mesh. Note that the segment types (TSHAP command) should not be used for this case.
Considerations for Geometry Correction
In general, curved contact and target surfaces can be well approximated by linear or quadratic contact and target elements when the mesh is sufficiently refined. However, in certain circumstances (for example, when linear elements are used or when the midside nodes of quadratic elements do not lie exactly on the initial curved geometry because a third party mesh generator was used), using a straight line in place of the true curved geometry can significantly affect the accuracy of contact stresses. An optional geometric correction can be used for a circular (or nearly circular) arc via SECTYPE and SECDATA section commands. The defined geometry correction can be applied to specific contact elements via a section ID (SECNUM command). For details, see Geometry Correction for Contact and Target Surfaces in the Contact Technology Guide.
Considerations for Fluid Penetration Loading
To model fluid penetration loads, use the SFE command to specify the fluid pressure and fluid penetration starting points. For more information, see Applying Fluid Pressure-Penetration Loads in the Contact Technology Guide.
Considerations for Thermal Contact Analysis
By default, the temperature is set to the value of TUNIF, and if this has no explicit value the temperature is set to zero. For thermal contact analysis, such as convection and radiation modeling, the behavior of a thermal contact surface (whether a “near-field” or “free” surface) is usually based on the contact status. Contact status affects the behavior of the contact surface as follows:
If the contact surface is outside the pinball region, its behavior is as a far-field of free surface. In this instance, convection/radiation occurs with the ambient temperature.
If the contact surface is inside the pinball region, the behavior is as a near-field surface.
However, the thermal contact surface status is ignored if KEYOPT(3) = 1 is set, and the surface is always treated as a free surface (see CONTA171, CONTA172, or CONTA175 for details).
A summary of the element input is given in "TARGE169 Input Summary". A general description of element input is given in Element Input.
TARGE169 Input Summary
- Nodes
I, J, K (J and K are not required for all segment types)
- Degrees of Freedom
UX, UY, TEMP, VOLT, AZ, PRES (determined by the associated 2-D contact elements: CONTA171, CONTA172, or CONTA175)
ROTZ is also valid, but only for the pilot node associated with a surface-based constraint or a rigid target surface
- Real Constants
R1, R2, [the others are defined through the associated CONTA171, CONTA172, or CONTA175 element]
- Material Properties
None
- Surface Loads
Pressure, Face 1 (I-J) (opposite to target normal direction)
- Body Loads
None
- Special Features
Birth and death Fluid pressure penetration Linear perturbation Nonlinear adaptivity Nonlinearity Rezoning Section definition for geometry correction of spherical and revolute surfaces - KEYOPT(2)
Boundary conditions for rigid target nodes:
- 0 --
Automatically constrained by the program
- 1 --
Specified by user
- KEYOPT(3)
Behavior of thermal contact surface:
- 0 --
Based on contact status
- 1 --
Treated as free-surface
- KEYOPT(4)
DOF set to be constrained on the dependent or independent DOF for internally-generated multipoint constraints (MPCs). This option is used for these situations: solid-solid and shell-shell assemblies; surface-based constraints that use a single pilot node for the target element; and rigid target surfaces that use the KEYOPT(2) = 1 setting.
- n --
Enter a three digit value that represents the DOF set to be constrained. The first to third digits represent ROTZ, UY, UX, respectively. The number 1 (one) indicates the DOF is active, and the number 0 (zero) indicates the DOF is not active. For example, 011 means that UX and UY will be used in the multipoint constraint. Leading zeros may be omitted; for example, you can enter 1 to indicate that UX is the only active DOF. If KEYOPT(4) = 0 (which is the default) or 111, all DOF are constrained.
Note: KEYOPT(4) is not supported for target elements used in a general contact definition.
- KEYOPT(6)
Symmetry condition of a constrained surface. This option is only used for a force-distributed constraint that uses a single pilot node for the target element:
- 0 --
No symmetry on the constrained surface (default).
- 1 --
The constrained surface has a symmetry condition with respect to the y axis of the nodal coordinate system of the pilot node.
- 10 --
The constrained surface has a symmetry condition with respect to the x axis of the nodal coordinate system of the pilot node.
Note: Keep the following points in mind when using this symmetry condition:
When a symmetry condition is used, the pilot node must be defined on the symmetry axis.
KEYOPT(6) = 11 is not valid input.
When the constrained surface is defined on a 2-D axisymmetric model and the pilot node is located on the y axis of the nodal coordinate system, KEYOPT(6) = 1 will be set internally. In this case, do not set KEYOPT(6) = 10; otherwise, the initial constraint equations will be redundant and the solution will be invalid.
Note: KEYOPT(6) is not supported for target elements used in a general contact definition.
- KEYOPT(7)
Weighting factor control key. This option is only used for a force-distributed constraint that uses a single pilot node for the target element.
- 0 --
Weighting factors are calculated internally based on the contact area of each contact node.
- 1 --
The weighting factor for each contact node is 1.
TARGE169 Output Data
The solution output associated with the element is shown in Table 169.2: TARGE169 Element Output Definitions. The following notation is used:
The Element Output Definitions table uses the following notation:
A colon (:) in the Name column indicates that the item can be accessed by the Component Name method (ETABLE, ESOL). The O column indicates the availability of the items in the file Jobname.OUT. The R column indicates the availability of the items in the results file.
In either the O or R columns, “Y” indicates that the item is always available, a number refers to a table footnote that describes when the item is conditionally available, and “-” indicates that the item is not available.
You can display or list the actual fluid pressure applied to the target element through several POST1 postprocessing commands, as shown below:
PLESOL,CONT,FPRS PLNSOL,CONT,FPRS PRESOL,CONT PRNSOL,CONT
Note that only the FPRS (fluid penetration pressure) output item is meaningful when the PRESOL and PRNSOL commands are used for target elements.
Table 169.3: TARGE169 Item and Sequence Numbers lists output available through the ETABLE command using the Sequence Number method. See Creating an Element Table in the Basic Analysis Guide and The Item and Sequence Number Table in this reference for more information. The following notation is used in Table 169.3: TARGE169 Item and Sequence Numbers:
- Name
output quantity as defined in the Table 169.2: TARGE169 Element Output Definitions
- Item
predetermined Item label for ETABLE command
- E
sequence number for single-valued or constant element data
- I,J
sequence number for data at nodes I, J
TARGE169 Assumptions and Restrictions
The 2-D segment element must be defined in the global X-Y plane.
For each pilot node, the program automatically defines an internal node and an internal constraint equation. The rotational DOF of the pilot node is connected to the translational DOF of the internal node by the internal constraint equation. ANSYS, Inc. recommends against using external constraint equations or coupling on pilot nodes; if you do, conflicts may occur, yielding incorrect results.
For circular arcs, the third node defines the actual center of the circle and must be defined accurately when the element is generated and must be moved consistently with the other nodes during the deformation process. If the third node is not moved consistently with the other nodes, the arc shape will change with that node's movement. To ensure the correct behavior, apply all boundary conditions to a pilot node.
For parabolic segments, the third point must lie at the middle of the parabola.
Generally speaking, you should not change the R1 real constant between load steps or during restart stages; otherwise ANSYS assumes the radius of the circle varies between the load steps. When using direct generation, the real constant R1 for circles may be defined before the input of the element nodes. If multiple rigid circles are defined, each having a different radius, they must be defined by different target surfaces.
For rotation of a rigid body constrained only by a bonded, rigid-flexible contact pair with a pilot node, use the MPC algorithm or a surface-based constraint as described in Multipoint Constraints and Assemblies in the Contact Technology Guide. Penalty-based algorithms can create undesirable rotational energies in this situation.
TARGE169 Product Restrictions
When used in the product(s) listed below, the stated product-specific restrictions apply to this element in addition to the general assumptions and restrictions given in the previous section.
ANSYS Mechanical Pro
Birth and death is not available.
Linear perturbation is not available.
ANSYS Mechanical Premium
Birth and death is not available.